CPU Ray-Tracer
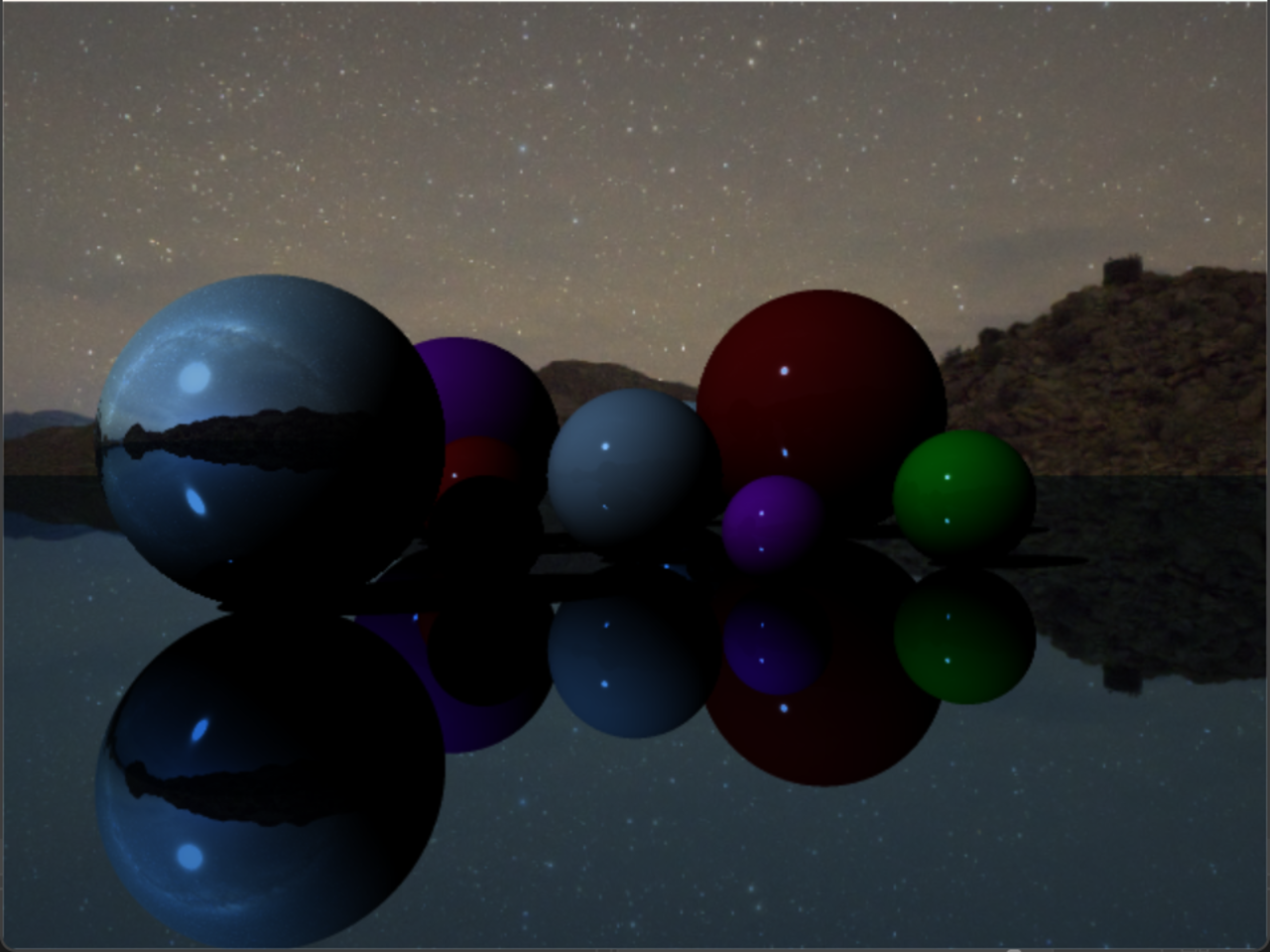
A software ray-tracer built from scratch to dive deep into graphics programming, master the math behind it, and experiment with rendering concepts.
A software ray-tracer built from scratch to dive deep into graphics programming, master the math behind it, and experiment with rendering concepts.
Description will appear here.


void Renderer::RenderPixel(Scene* pScene, uint32_t pixelIndex, float fov, float aspectRatio, const Matrix& cameraToWorld, const Vector3& cameraOrigin, const float focalDist) const
{
auto& materials = pScene->GetMaterials();
auto& lights = pScene->GetLights();
const uint32_t px{ pixelIndex % m_Width };
const uint32_t py{ pixelIndex / m_Width };
// Change the color (default black)
ColorRGB finalColor{0, 0, 0};
// HitRecord contains more information about a potential hit
HitRecord closestHit{};
Ray viewRay{};
// Go over every ray in each pixel (for loops will loop only once if AA is disabled)
for (int rowIdx{}; rowIdx < (m_AntiAliasingEnabled ? m_AAPixelRows : 1); ++rowIdx)
{
for (int colIdx{}; colIdx < (m_AntiAliasingEnabled ? m_AAPixelCols : 1); ++colIdx)
{
// Calculate the offset within the pixel (middle of each cell of the pixel)
float xOffset = (colIdx + 0.5f) / (m_AntiAliasingEnabled ? m_AAPixelRows : 1);
float yOffset = (rowIdx + 0.5f) / (m_AntiAliasingEnabled ? m_AAPixelCols : 1);
Vector3 pixelSample = { px + xOffset,
py + yOffset,
0.f };
// Converting screen space coordinates to NDC
float x = (2 * ((pixelSample.x) / m_Width) - 1) * fov * aspectRatio;
float y = (1 - 2 * ((pixelSample.y) / m_Height)) * fov;
Vector3 rayDirection = Vector3{ x, y, 1 };
rayDirection = rayDirection.Normalized();
// Transforming the viewDirection from camera space to world space
rayDirection = cameraToWorld.TransformVector(rayDirection);
// Sample multiple rays if DoF is enabled
for (int dofSampleIdx{}; dofSampleIdx < (m_DepthOfFieldEnabled ? m_DoFSamples : 1); ++dofSampleIdx)
{
// Sample a random ray if DoF is enabled, but we aren't the first sample
if (m_DepthOfFieldEnabled and dofSampleIdx != 0)
{
Vector3 right = cameraToWorld.GetAxisX();
Vector3 up = cameraToWorld.GetAxisY();
Vector3 forward = cameraToWorld.GetAxisZ();
// Calculate the focal point
Vector3 focalPoint = cameraOrigin + focalDist * rayDirection;
// Get a random new position within the camera plane
uint32_t seed = (pixelIndex + 1585) * (pixelIndex + 874552) * (dofSampleIdx + 1) * ((rowIdx + 15) * (colIdx - 58) + 15485) * (colIdx + 1);
Vector3 randVec = Vector3::RandomVecInUnitDisk(seed);
randVec /= m_DoFAperture;
// Calculate the new ray origin
Vector3 offset = right * randVec.x + up * randVec.y;
Vector3 newOrigin = cameraOrigin + offset;
// Calculate this sample's direction towards the focal point
Vector3 newDir = (focalPoint - newOrigin).Normalized();
// Ray going from the offset origin to the focal point
viewRay = { newOrigin, newDir };
}
// If DoF is disabled, or we are the first sample, make the viewray the default ray without offsets
else if (!m_DepthOfFieldEnabled or dofSampleIdx == 0)
{
// Ray going from the origin of the camera to the center of each pixel cell
viewRay = { cameraOrigin, rayDirection };
}
pScene->GetClosestHit(viewRay, closestHit);
if (closestHit.didHit)
{
// If we hit something, cast a new ray from the HitOrigin to every light in the scene, if that ray
// hits another object, we need to cast a shadow (multiply the color by 0.5f)
for (int lightIndex{}; lightIndex < lights.size(); ++lightIndex)
{
Vector3 lightDirection;
Ray lightRay;
if (lights[lightIndex].type == LightType::Point)
{
lightDirection = { LightUtils::GetDirectionToLight(lights[lightIndex], closestHit.origin) };
float rayMaxValue = lightDirection.Normalize();
lightRay = { closestHit.origin + closestHit.normal * 0.001f, lightDirection, 0.0001f, rayMaxValue };
}
else
{
lightDirection = { -lights[lightIndex].direction.Normalized() };
lightRay = { closestHit.origin + closestHit.normal * 0.001f, lightDirection };
}
// If the ray from the point to our light hit something while shadows are enabled, skip this light (we are in shadow)
if (m_ShadowsEnabled and pScene->DoesHit(lightRay)) continue;
// If our point is not within the observable area of our light, skip this light
float observedArea = Vector3::Dot(closestHit.normal, lightDirection);
if (observedArea <= 0.f) continue;
if (m_CurrentLightingMode == LightingMode::ObservedArea)
{
finalColor.r += observedArea;
finalColor.g += observedArea;
finalColor.b += observedArea;
}
else if (m_CurrentLightingMode == LightingMode::Radiance)
{
finalColor += LightUtils::GetRadiance(lights[lightIndex], closestHit.origin);
}
else if (m_CurrentLightingMode == LightingMode::BRDF)
{
finalColor += materials[closestHit.materialIndex]->Shade(closestHit, lightDirection, viewRay.direction, pScene, m_Bounces);
}
else if (m_CurrentLightingMode == LightingMode::Combined)
{
const ColorRGB RADIANCE = LightUtils::GetRadiance(lights[lightIndex], closestHit.origin);
const ColorRGB BRDF = materials[closestHit.materialIndex]->Shade(closestHit, lightDirection, viewRay.direction, pScene, m_Bounces);
finalColor += RADIANCE * BRDF * observedArea;
}
}
}
else
{
finalColor += pScene->GetBackgroundColor(viewRay.direction);
}
}
}
}
// Average Color
if (m_AntiAliasingEnabled) finalColor /= static_cast<float>(m_AAPixelCols * m_AAPixelRows);
if (m_DepthOfFieldEnabled) finalColor /= static_cast<float>(m_DoFSamples);
//Update Color in Buffer
finalColor.MaxToOne();
// Check if we need to color the selected pixel
if (m_Select)
{
if (m_SelectPixelX == px and m_SelectPixelY == py ||
m_SelectPixelX == px and m_SelectPixelY + 1 == py ||
m_SelectPixelX == px and m_SelectPixelY - 1 == py ||
m_SelectPixelX - 1 == px and m_SelectPixelY == py ||
m_SelectPixelX + 1 == px and m_SelectPixelY == py)
{
finalColor = m_SelectColor;
}
}
ColorRGB vignette = CalculateVignetteFactor(px, py, aspectRatio);
ColorRGB noise = CalculateNoise();
ColorRGB endColor;
endColor = finalColor * vignette + noise;
ApplyGamma(endColor);
endColor.MaxToOne();
{
if (m_DebugBVHMode == 1)
{
endColor.r = viewRay.triCalcs / float(m_TriCalcLimit);
endColor.g = viewRay.triCalcs / float(m_TriCalcLimit);
endColor.b = viewRay.triCalcs / float(m_TriCalcLimit);
if (viewRay.triCalcs > m_TriCalcLimit) endColor = colors::Red;
if (viewRay.triCalcs == 0) endColor = colors::Gray;
}
if (m_DebugBVHMode == 2)
{
// DEBUG BVH CALS VIS
endColor.r = viewRay.aabbCalcs / float(m_BVHCalcLimit);
endColor.g = viewRay.aabbCalcs / float(m_BVHCalcLimit);
endColor.b = viewRay.aabbCalcs / float(m_BVHCalcLimit);
if (viewRay.aabbCalcs > m_BVHCalcLimit) endColor = colors::Red;
if (viewRay.aabbCalcs == 1) endColor = colors::Gray;
}
}
m_pBufferPixels[px + (py * m_Width)] = SDL_MapRGB(m_pBuffer->format,
static_cast<uint8_t>(endColor.r * 255),
static_cast<uint8_t>(endColor.g * 255),
static_cast<uint8_t>(endColor.b * 255));
}
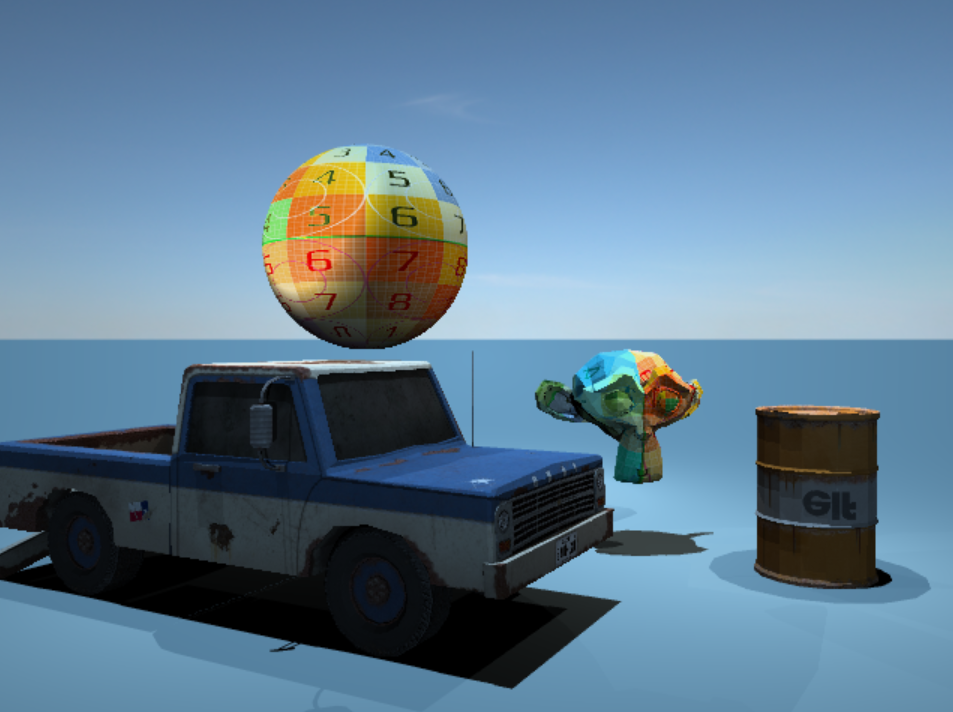
Several optimizations have been applied to improve the Software Ray-Tracer, as they tend to be slow by default.
For efficient ray-triangle intersection calculations, I used the Möller–Trumbore algorithm.
Another clear performance boost is multi-threading the process for faster computations, which can easily be done using the C++ STL.
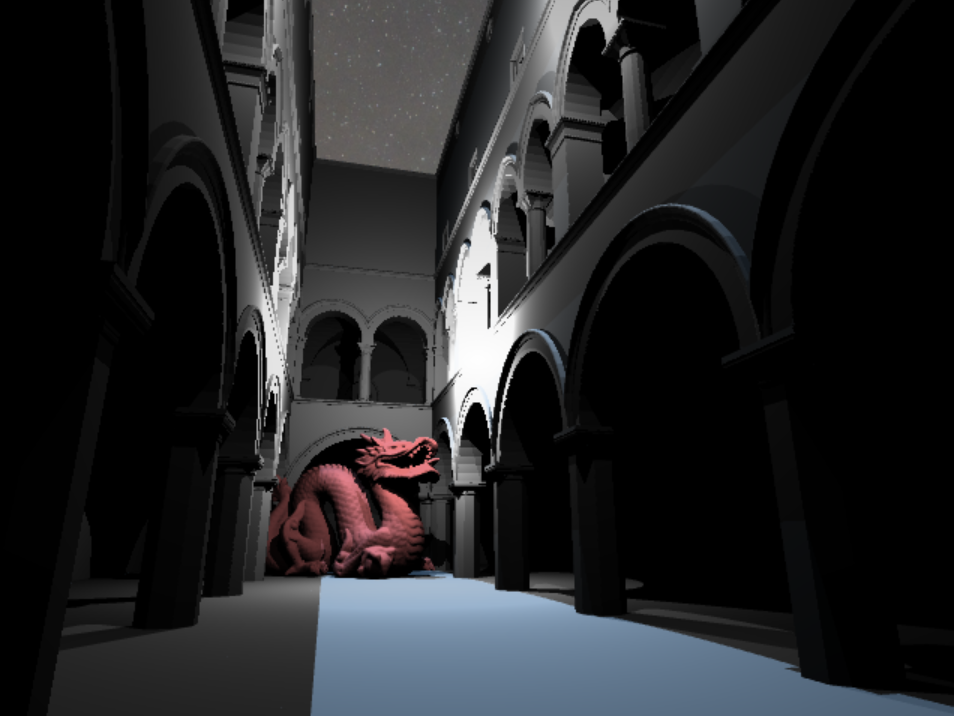
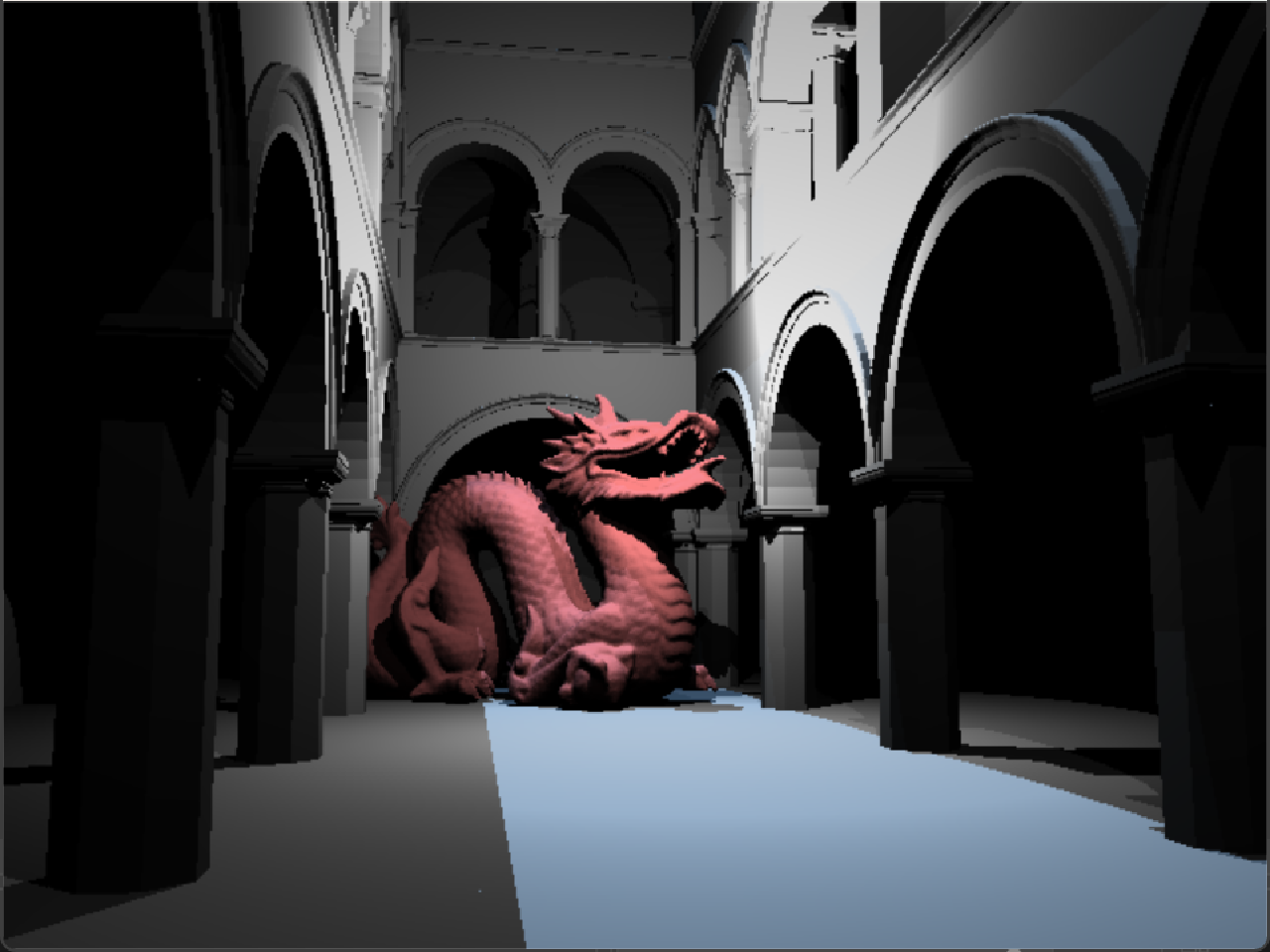
To improve the renderer even further, I implemented Bounding Volume Hierarchies (BVH) to reduce the amount of expensive ray-triangle intersection calculations, replacing them with simpler ray-AABB intersections. The following scene has nearly 300K triangles. Without BVH optimization, this would render extremely slowly. Thanks to BVH, it runs relatively smooth on the CPU. The GitHub README has a more in-depth look at how this works.
Here are some code samples of how the BVH was implemented:
First, the base BVH Node struct. This struct holds the information of a node. As the comment explains, the leftFirstIndex stores either the index of the node's left childs or the index of the first triangle. We don't need to store the right child's index, as that is leftFirstIndex + 1. And since a node either has children or triangles, and never both, we can combine it as one variable to save some space and have a neat memory alignment of 32 bytes.
// Each BVH Node is 32 bytes
struct BVHNode
{
AABB nodeBounds; // 3 x 4 bytes = 24 bytes
uint32_t leftFirstIndex; // 4 bytes // stores either the index of the left child or of the first triangle
uint32_t triCount; // 4 bytes
bool IsLeaf() const { return triCount > 0; }
};
inline bool HitTest_TriangleMesh(const TriangleMesh& mesh, const int nodeIdx, const Ray& ray, HitRecord& hitRecord, bool ignoreHitRecord = false)
{
const BVHNode& node = mesh.bvhNodes[nodeIdx];
// If we are the root node, check if the ray hit's the root node AABB
// This is only done for the root node, since for any subsequent children, this check is checked beforehand
if (nodeIdx == 0 && HitTest_AABB(node.nodeBounds, ray) >= FLT_MAX - 1)
return false;
// If we are a leaf, check for the closest triangle hit
if (node.IsLeaf())
{
HitRecord newClosestHit{};
int closestIndex = -1;
for (int triIdxOffset{}; triIdxOffset < node.triCount; ++triIdxOffset)
{
const int triIdx = (node.leftFirstIndex + triIdxOffset);
const int triIdxPos = 3 * triIdx;
const int v0Idx = mesh.indices[triIdxPos + 0];
const int v1Idx = mesh.indices[triIdxPos + 1];
const int v2Idx = mesh.indices[triIdxPos + 2];
Triangle triangle(mesh.transformedPositions[v0Idx]
, mesh.transformedPositions[v1Idx]
, mesh.transformedPositions[v2Idx]
, mesh.transformedNormals[triIdx]);
triangle.cullMode = mesh.cullMode;
triangle.materialIndex = mesh.materialIndex;
// Calculate closest triangle hit
GeometryUtils::HitTest_Triangle(triangle, ray, newClosestHit);
if (!newClosestHit.didHit) continue;
if (newClosestHit.t < hitRecord.t)
{
hitRecord = newClosestHit;
closestIndex = triIdx;
}
}
if(closestIndex != -1 and !ignoreHitRecord)
mesh.CalculateUV(closestIndex, hitRecord);
return hitRecord.didHit;
}
// if we are not a leaf node
else
{
bool hitLeft = false;
bool hitRight = false;
// Calculate the distance from our ray to each of the children's bounding boxes
const BVHNode& leftChildNode = mesh.bvhNodes[node.leftFirstIndex];
const float distLeft = HitTest_AABB(leftChildNode.nodeBounds, ray);
const BVHNode& rightChildNode = mesh.bvhNodes[node.leftFirstIndex + 1];
const float distRight = HitTest_AABB(rightChildNode.nodeBounds, ray);
// If the left child is closer, check that one first
if (distLeft < distRight)
{
// only actually check the bounding boxes if they're closer than anything else we've encountered
if (distLeft < hitRecord.t) hitLeft = HitTest_TriangleMesh(mesh, node.leftFirstIndex, ray, hitRecord, ignoreHitRecord);
if (distRight < hitRecord.t) hitRight = HitTest_TriangleMesh(mesh, node.leftFirstIndex + 1, ray, hitRecord, ignoreHitRecord);
return hitLeft or hitRight;
}
// else check the right child first;
else
{
// only actually check the bounding boxes if they're closer than anything else we've encountered
if (distRight < hitRecord.t) hitRight = HitTest_TriangleMesh(mesh, node.leftFirstIndex + 1, ray, hitRecord, ignoreHitRecord);
if (distLeft < hitRecord.t) hitLeft = HitTest_TriangleMesh(mesh, node.leftFirstIndex, ray, hitRecord, ignoreHitRecord);
return hitLeft or hitRight;
}
}
}
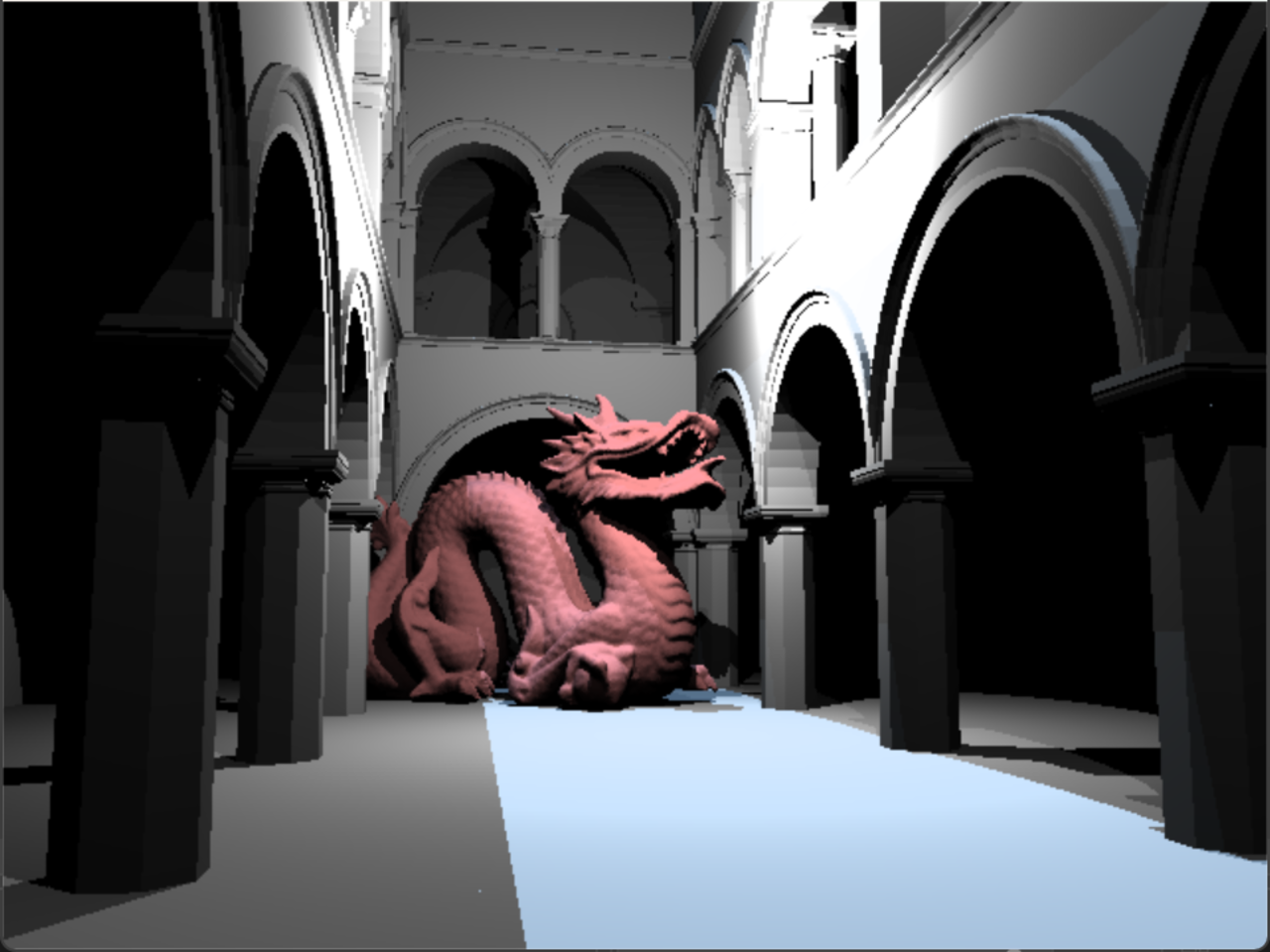
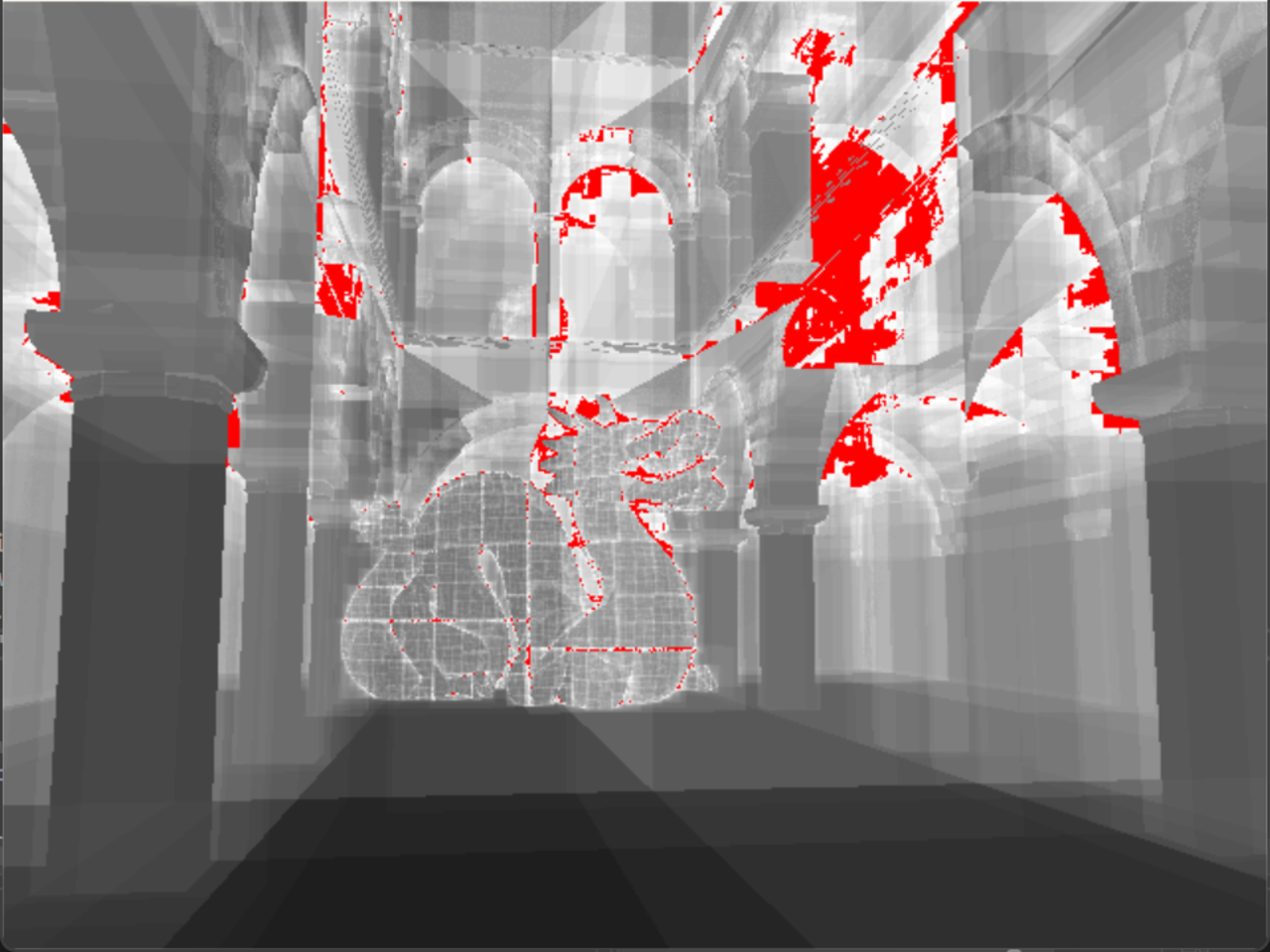
In the BVH Visualization tab, the whiter the area, the closer to 180 ray-aabb intersection calculations are happening for that pixel. Red means it's doing more than 180, which might seem high, but ray-AABB is relatively cheap to compute.
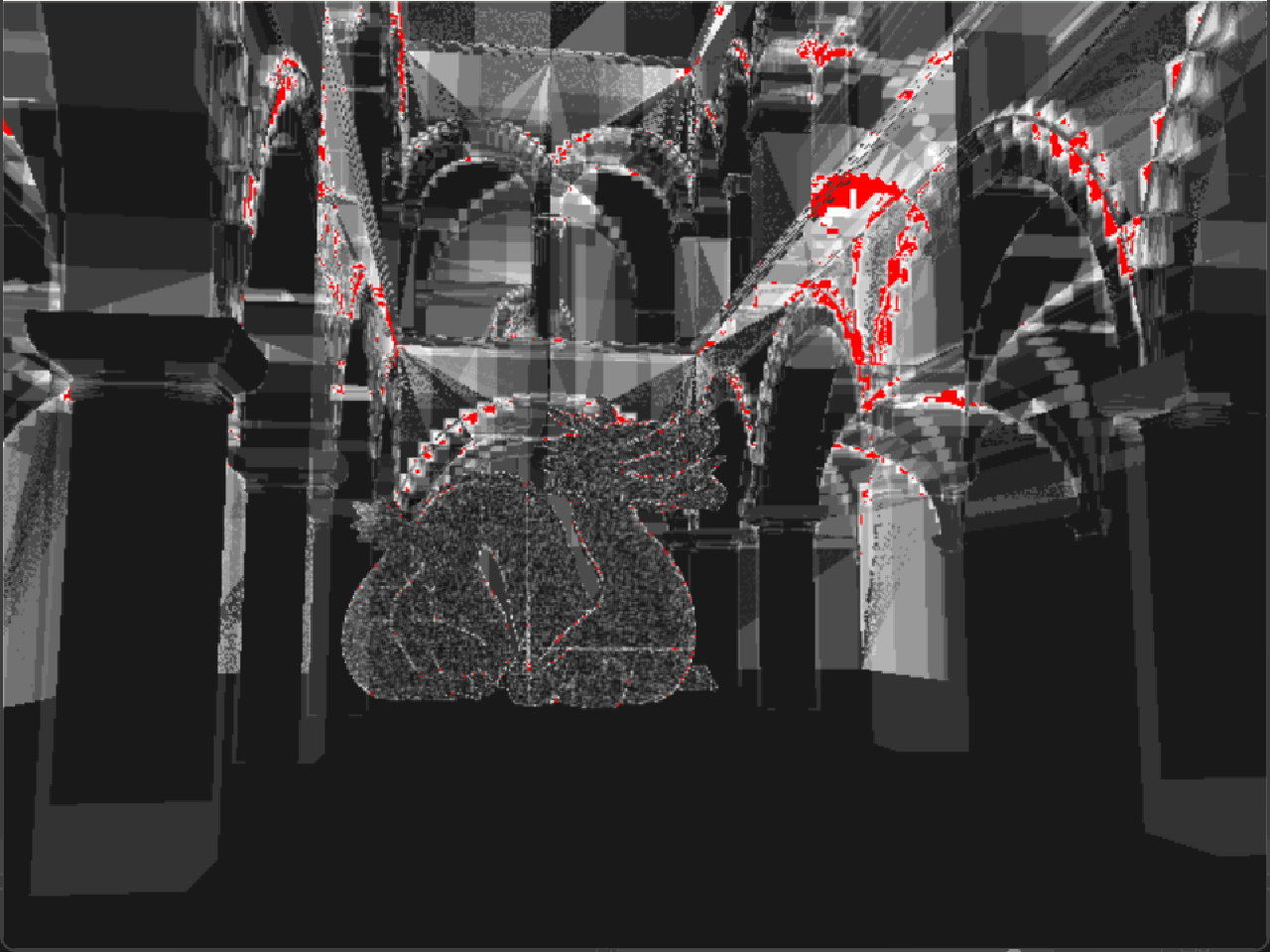
On the other hand, the Triangle Visualization tab shows how many ray-triangle intersection calculations are happening per pixel. The whiter the pixel, the closer it is to 20 calculations, and red means more. These calculations are more expensive, so it's ideal to keep them low.